Thoughts on a wild year and behind-the-scenes milestones

By Chris Urmson
We started 2021 by sharing some of our biggest milestones to date: acquiring Uber ATG and an integrated photonics company, more than doubling our headcount, releasing a comprehensive Safety Report, launching a Safety Advisory Board, and partnering with Paccar, Volvo, and Toyota to deliver self-driving trucks and cars.
As we refine our technology and prepare to launch commercial pilots later this year, here are five key areas where we’ve made significant progress that we’ll be building upon through the rest of 2021.
One: Driving hundreds of millions of virtual miles every week
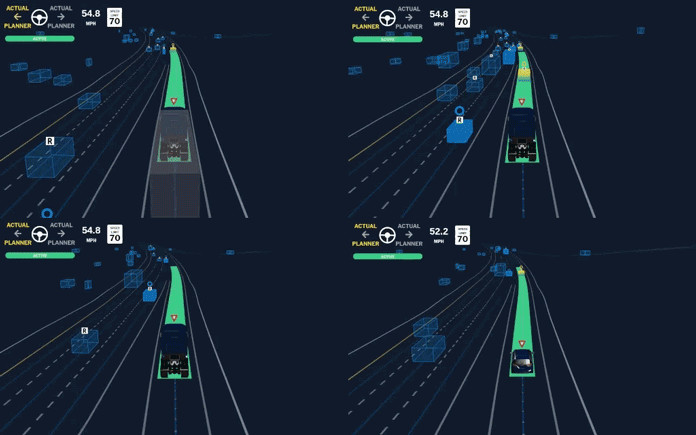
We leverage offline testing via our Virtual Testing Suite to safely accelerate our development. Our simulations are an incredibly efficient way to test, as they concentrate on specific behaviors in a very high density of challenging scenarios that are rarely encountered during everyday driving. This broad suite of virtual tests is designed to create a near-perfect virtual replica of the Aurora Driver—faithfully capturing not only how it makes decisions, but also how it sees the world, even as atmospheric, lighting, and other relevant conditions change.
This virtual development suite builds on a basis of real-world interactions encountered by our on-road vehicles and those of a partner whose fleet drives over 7.5 billion miles each year. It’s then massively permutated to expand the test set to the world of scenarios that could have feasibly played out had any of a number of factors changed, from a neighboring vehicle, pedestrian, or bicyclist behaving differently to the sheer number of other actors in the scenario being much larger or much smaller.
Between 2017 and 2020, our virtual testing generated the equivalent* of over 3 billion real-world miles. By June of this year, we had exceeded 5 billion as our enhanced virtual development tooling and expanded team allowed our engineers to chew through an average of over 22 million miles each day. By year’s end, we expect to have driven the on-road equivalent of over 9 billion miles.
Another way to think about it: an on-road fleet of 100 trucks gets you ~100 round trips between Dallas and Houston each day, if you’re lucky. This fleet experiences only the driving scenarios and environmental conditions that happened to occur on that route, that day. In contrast, our virtual fleet drives the daily equivalent of over 46,000 round trips between Houston and Dallas, experiencing a diversity of scenarios and driving conditions that would take even a large on-road fleet decades to experience. Put another way, our virtual fleet “drives” the equivalent of 47 round trips. To the moon. Every day.
Two: Adding key capabilities and defining progress
The ability to drive over a million virtual miles a day has led to an explosive growth of technical progress, especially around key capabilities for highway and urban driving. To track our progress, we compile key metrics to understand performance trends at multiple levels of detail, and we weigh offline test results by exposure probability and severity. We use these metrics to make informed decisions and prioritize the next steps in the development of the Aurora Driver.
As we look to the next year, our progress puts us on track to improve our software dramatically every quarter, even as we expand our capabilities to include “long-tail” events, like navigating construction zones and debris in the road, detecting small objects, and accommodating emergency vehicles.
Three: Designing a safe, reliable, and scalable Aurora Driver
In the first half of this year, our world-class hardware team developed a new hardware kit that blends the best hardware from Aurora and ATG. We paired more powerful sensors condensed in a sleek, modular automotive-grade rack, with a new powerhouse computer, allowing the Aurora Driver to consume more data, even faster. The end result is a feature-complete, safer, reliable Driver ready to be deployed at a commercial scale. Expect to see this hardware integrated on our Class 8 trucks when it’s deployed in commercial pilots in Texas and in our Toyota Siennas.
Four: Delivering goods for early customers with unparalleled efficiency
With our on-road fleet that runs multiple testing shifts a day in Texas, we make, test, and validate improvements to our software with a same-day turnaround. As we work towards launching our second commercial pilot later this year, we have a fleet of Class 8 trucks gathering data on highways and selectively pulling loads for customers. We’ve also identified our first terminal in a critical location near a major interstate commerce route in the Texas Triangle. By the end of the year, we plan to bring our first and second terminals online and select our third and fourth terminals.
Five: Launching Driver-as-a-service with half of the Class 8 trucking market
Through long-term, strategic partnerships with PACCAR and Volvo Trucks—who collectively produce almost 50% of all Class 8 trucks sold in the United States—we’re making rapid progress toward delivering our trucking product and service in 2023. We have Peterbilt 579s with the Aurora Driver up and running in Texas, and are preparing the Kenworth T680. With Volvo Trucks, we’re well underway in integrating the Aurora Driver into our second Volvo truck, developing the servicing plan with Volvo Autonomous Solutions, and preparing for our commercial launch in Texas.
Looking ahead
We’ve long said Aurora approaches the enormous challenge of self-driving technology differently. This isn’t our team’s first rodeo. In lieu of publishing glossy demos, we’re focusing our efforts on making real, tangible progress on our product and continuing work with the largest transportation players in the world to deliver and commercialize the Aurora Driver. As we look to what comes next, expect to see us release our first full safety case framework, integrate our latest hardware kit into our truck and passenger car testing fleets, announce major carrier partnerships, operationalize our first terminals, operate daily between Dallas and Houston, and more.
As you can see, we started 2021 with our foot on the accelerator and we’re only picking up speed!
*Aurora’s Virtual Testing Suite presents the self-driving system with highly-concentrated interactions that occur much less frequently in naturalistic driving through most operational environments. Real-world equivalent miles estimate the rate at which these interactions would occur while driving naturalistically in a given operational domain. Aurora has been conservative in its application of this estimate.
Related (06)

The Road Never Sleeps: Aurora’s Trucks Go Driverless Day and Night

Trust and Transparency: Aurora’s Work with Government Leaders Ahead of Self-Driving Operations

Answering More of Your Questions About Aurora and Autonomous Vehicles

Have Questions About Aurora and AVs? Get Your Answers Here.

Recap: Aurora’s Q2 2022 progress toward commercial launch
