Recognizing and avoiding a stopped vehicle
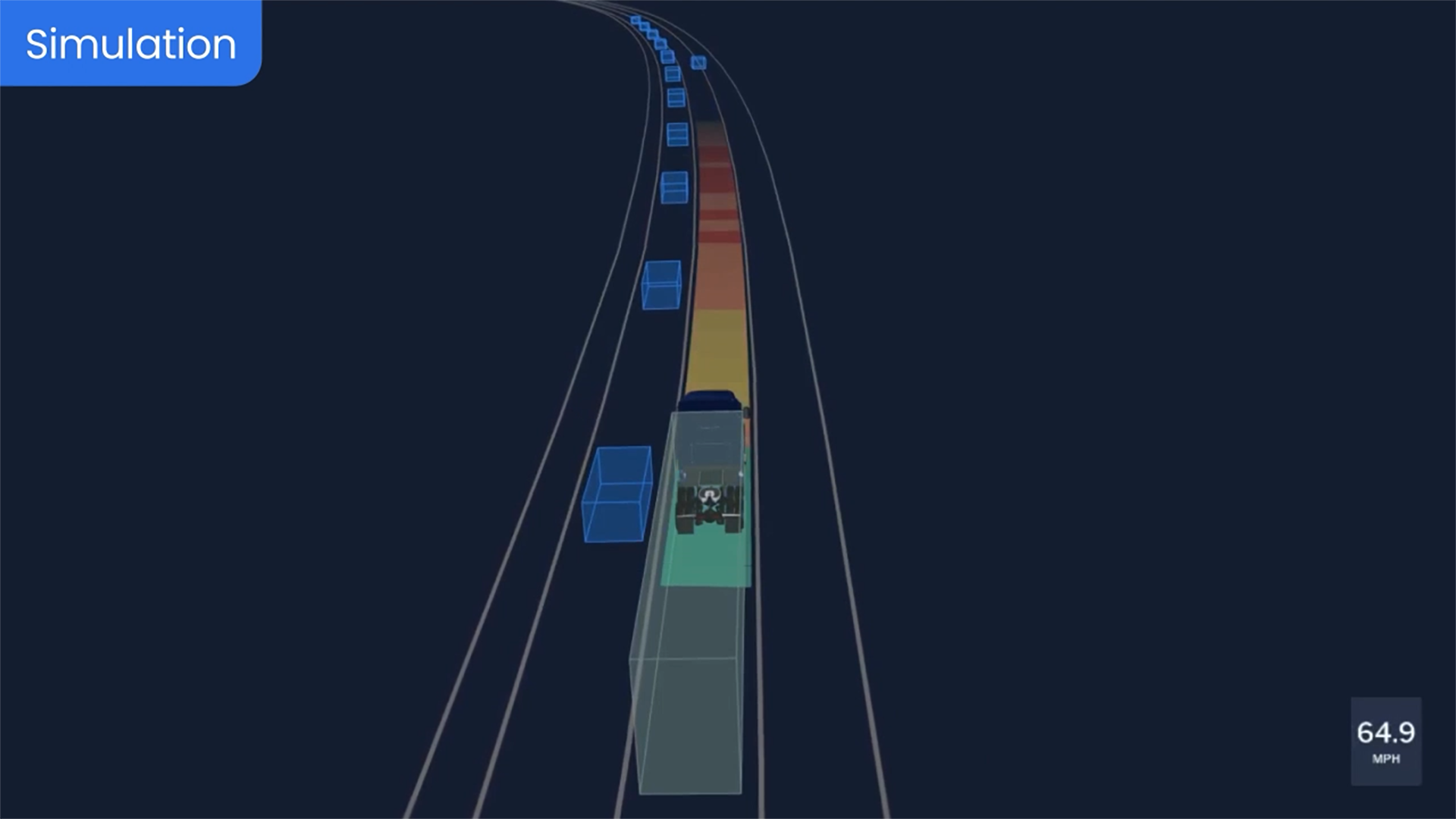
The Aurora Driver detects a stopped vehicle in its path from over 150 meters away and safely maneuvers around it.
In this simulation, the Aurora Driver is traveling at highway speed when it detects a stalled vehicle blocking its lane in the distance. A stream of synthetic traffic prevents the Aurora Driver from changing lanes, so the Aurora Driver slows to avoid a collision. It then waits for traffic to clear before navigating around the stopped vehicle. Additional info: Certain scenarios are difficult or dangerous to practice on public roads, so we train the Aurora Driver extensively in our Virtual Testing Suite. Using simulated camera, lidar, and radar data, we can rapidly test various permutations of a scenario, controlling variables like visibility conditions, speed, positions of other road actors, and more.
Related (06)
Planning

Detecting a pedestrian running across the highway
Planning

Making space for aggressive drivers on the highway
Planning

Detecting and sharing the road with emergency vehicles
Planning

Anticipating and avoiding a collision with a red light runner
Planning

Avoiding a collision at an intersection
Planning
